




SwivelSpeakers
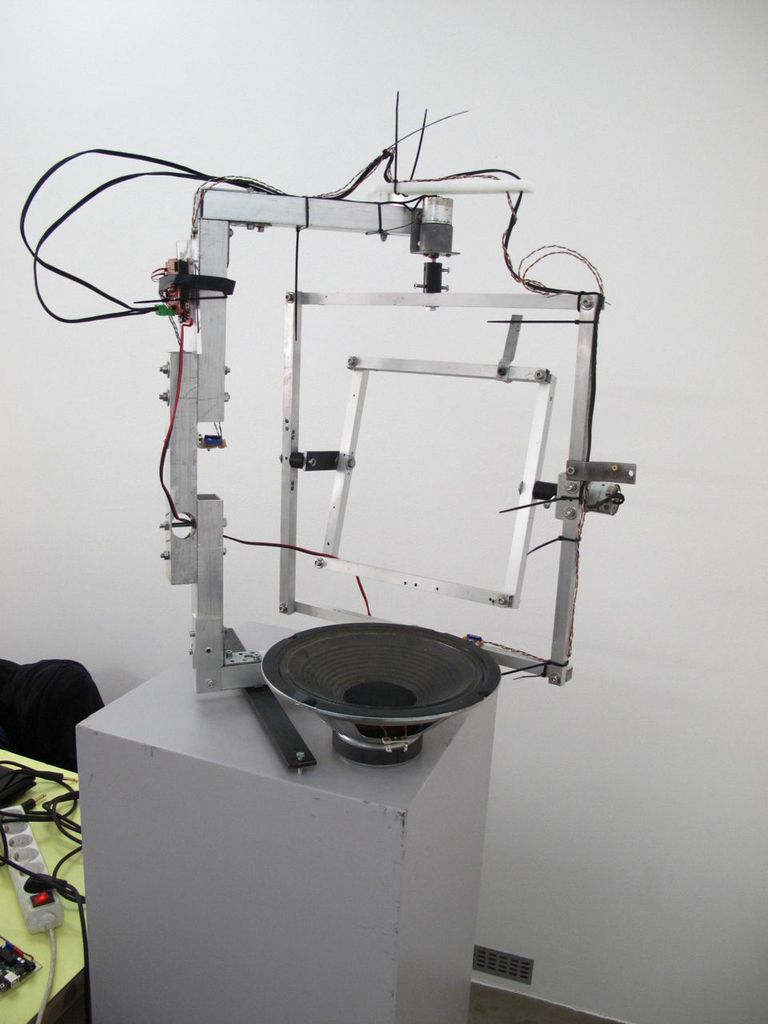
These are midi-controlled XY loudspeaker positioning systems driven by dc, servo or stepper motors (vertical and horizontal axis’ turning). The swivel system provides movements of one to a couple of turns in each direction – therefore relatively precise positioning of loudspeaker.
First devised by Stefan Doepner – he perfected the mechanical solutions over time (slip rings…), and Borut Savski perfected electronics and programming – in the direction of a wireless data exchange system.
Below: progression from 2013 onwards: the prototype, followed by 2014 model, etc.


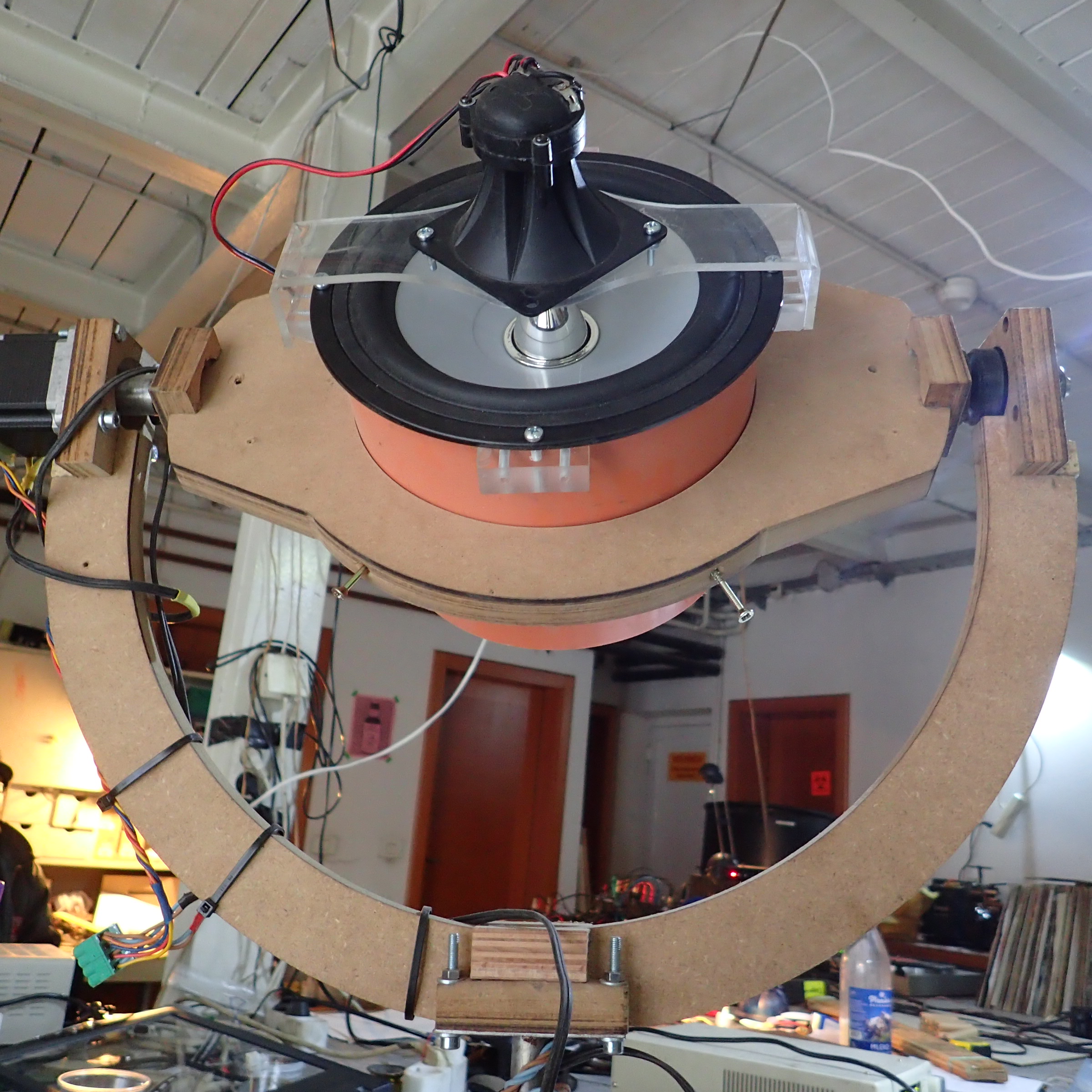

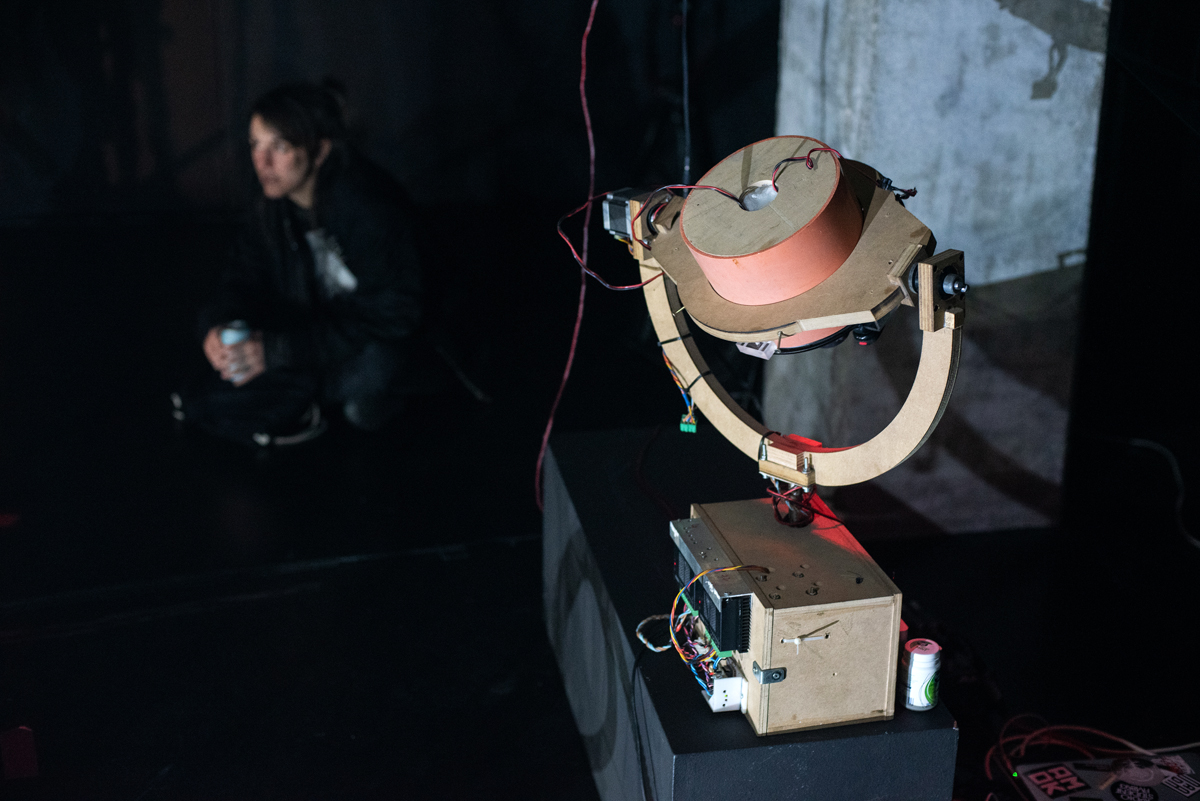
still being used in 2019…
MIDI controls:
– midi channel defines the selection of a particular loudspeaker
– note 0 is used for X motor position
– note 1 is used for Y motor position
– velocity on notes 0 and 12 are 64 for4 zero positions, 0 is the most left, 127 is the most right position (clearly, this defines the position resolution – becoming less precise as the range is going over one full turn)
– note 2 is used for X motor speed
– note 3 is used for Y motor speed
– notes 4, 5, etc. were used to define some behaviors (a bit more complex sequences of movements) – but have been dropped later


